SpaceBot Cup 2013
21 November 2013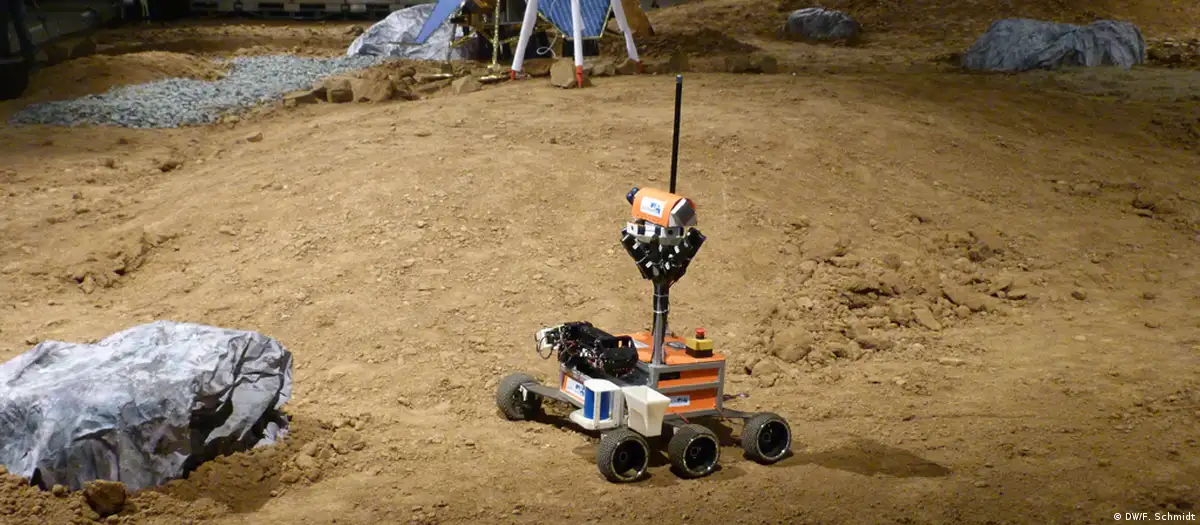
Pusat penelitian penerbangan dan antariksa Jerman (DLR) membangun permukaan yang menyerupai sebuah planet buatan. Sepuluh tim dari berbagai universitas dan perusahaan pengembang di Jerman menunjukkan apa yang mampu dilakukan robotnya pada kondisi seperti di planet asing. DLR SpaceBot Cup adalah kompetisi robot antariksa yang hanya digelar tahun ini.
Skenario kompetisi sangat realistis, Di planet Mars beberapa generasi Mars Rover milik NASA sudah sukses bertugas. Berdasar pengalaman, butuh waktu lama untuk mengirim sinyal dari bumi ke antariksa. 15 menit waktu yang diperlukan sinyal komunikasi untuk satu arah. Jadi 30 menit untuk mendapatkan jawaban. Dan jika robot suatu saat dituntut untuk melakukan eksplorasi dengan jarak yang lebih jauh, maka kontak dengan bumi bisa semakin berkurang. Solusinya, robot antariksa masa depan yang bisa bergerak independen dengan bantuan teknologi kecerdasan buatan.
Mencari Air di "Planet Asing"
Seperti pada pesawat antariksa Mars sesungguhnya, robot ditugaskan untuk menemukan kandungan air. Tapi air tidak tersembunyi di dalam batuan atau atmosfir, melainkan di dalam gelas yang dicat warna biru yang diletakkan di permukaan planet buatan tersebut. Robot harus bisa menemukannya sendiri, mengambilnya, dan membawanya ke tempat pengumpulan sampel yang telah ditentukan sebelumnya.
Tugas ini menunjukkan dengan cepat kekuatan dan kelemahan setiap robot. Ada yang mampu berjalan dengan baik, seperti misalnya Lauron. Bentuknya menyerupai binatang merayap berkaki enam dan dikembangkan pusat penelitian informatika dari Karlsruhe. Mereka meniru belalang ranting asal India. "Kakinya memiliki empat derajat kebebasan, jadi sangat fleksibel. Kaki bagian depan kami lengkapi dengan semacam lengan", jelas juru bicara tim Lars Pfotzer. Serangga bisa melipat lengannya sedemikian rupa sehingga tidak mengganggu saat berjalan, "tapi kalau ia memerlukannya, maka akan dikeluarkan ke arah depan."
Supaya Lauron tidak harus berjalan dengan lima kaki setelah mengambil gelas air, ada semacam alat pemegang gelas di bawah perut. Jadi ia bisa tetap bergerak dengan enam kaki. Untuk orientasi, robot serangga ini menggunakan lasercanner. Alat ini berputar di atas robot dan merekam gambar tiga dimensi dari lingkungan sekitarnya.
Permainan Komputer dengan Sensor Hightech
Tapi Lauron juga bisa melihat dengan mata biasa. "Kami juga memasang kamera khusus dengan teknologi yang dikenal dari konsol Kinect" jelas Pfotzer. Kamera merekam gambar di sekitarnya sebagai gabungan titik dan menerjemahkannya sebagai gambar tiga dimensi. Gambar ini membantu robot mengetahui jarak terhadap gelas air dan mengenalinya sebagai obyek.
Simak lanjutannya di halaman berikut.
Hanya jika robot bisa dengan sendirinya mengidentifikasi benda seperti gelas, barulah ia melakukan aksi selanjutnya. Yakni, mengambil dan membawanya pergi. Sama seperti misalnya yang dilakukan NimbRo Centauro. Ini nama robot dengan enam roda yang dirakit tim universitas dari Bonn. NimbRo Centauro telah menemukan gelasnya. Kini ia mulai bekerja. Perlahan lengannya meraih gelas, mengangkat dan menggesernya ke wadah plastik yang memiliki tutup.
Ini sepertinya memang tidak spektakuler, tapi setiap langkah mendapat tepuk tangan dari penonton. Pembawa acara kompetisi tampak antusias: "Tidak ada tetes air yang tumpah! Dan atas keberhasilan mengambil gelas juga mendapat poin dari juri!"
Serangan dari Udara
Tim dari TU Chemnitz membawa tiga robot sekaligus yang akan menyelesaikan tugas secara bersama. Salah satu robotnya bahkan bisa terbang. "Robot terbang mengumpulkan informasi dari udara dan menemukan gelas air tersebut", jelas juru bicara tim Peter Protzel. Quadrocopter menandakan di peta apa yang ditangkapnya dari kamera dengan resolusi tinggi. Data peta bisa diakses oleh ketiga robot tersebut. "Robot darat bisa menggunakan peta ini."
Robot terbang mungkin tidak bisa dioperasikan, karena atmosfirnya berbeda dari di bumi. Tapi kompetisi DLR tidak hanya berfokus pada antariksa. "Robot seperti ini juga bisa digunakan di bumi. Misalnya pada lokasi bencana, seperti di Fukushima", tegas Protzel. "Quadrocopter bisa dikerahkan di sana. Robot bisa terbang masuk ke gedung. Teknik ini bisa dicoba disini."
Kelemahan dan Keunggulan
Robot yang berkompetisi tidak punya masalah dengan memindahkan gelas air, jika sudah menemukan lokasinya. Kesulitan yang dialami beberapa robot adalah menempuh jarak sejauh itu. "Tantangan terbesar justru hal yang kelihatannya paling mudah. Seperti bergerak dan mencari obyek", ujar Andreas Birk dari Jacobs-University Bremen yang bertahun-tahun meneliti dunia robot.
Tapi pada akhirnya semua robot kurang lebih menyelesaikan tugas yang diminta oleh DLR. Masing-masing tim memiliki kekuatan di bidang tersendiri dan kelemahan di bidang lain. Pujian datang dari para juri. Namun, tidak ada tim yang berhasil mendapatkan gelar juara utama.